 |
機器概要
|
 |
機器概観
|
 |
標準取り付け金具と ・・・
オプション金具例 |

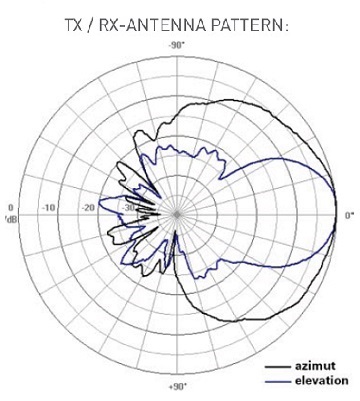 |
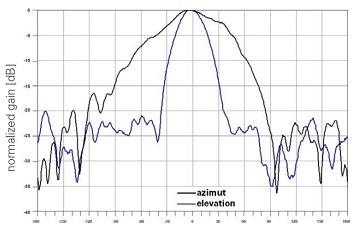
アンテナ指向性 -3dB幅 |
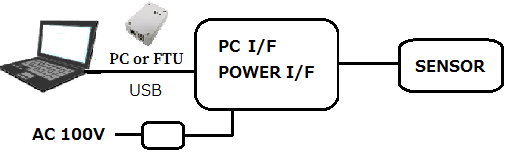 |
機器接続図 |
 |
汎用通信ソフトによる設定 |

|
|
 |
|
 |
|
|
|
機器概要
|
|
|
機器概観
|
|
|
標準取り付け金具と ・・・
オプション金具例 |
|
|
アンテナ指向性 -3dB幅 |
|
|
機器接続図 |
|
|
汎用通信ソフトによる設定 |
|
|
|
|
|
|
|
|
|